中国·国望集团山东办事处
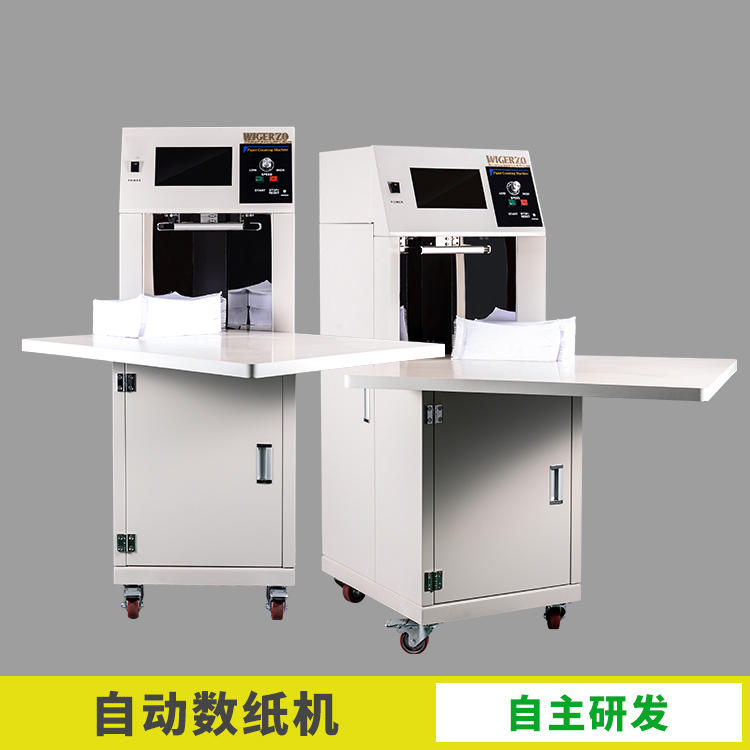
专业生产:切纸机、卸纸机、数纸机等
全国服务热线13371563040
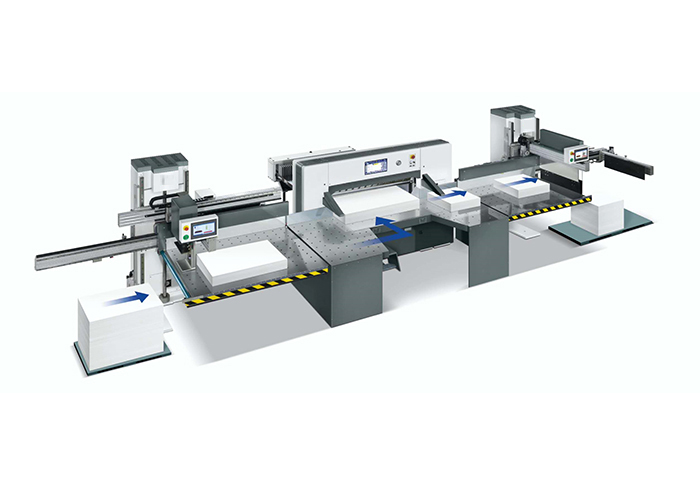
机械手臂卸纸机通常是指在工业自动化领域中,用于卸载纸张或其他材料的机器人手臂。卸纸机的工作原理主要基于以下几个方面:
1.**机械结构**:机械手臂由多个关节和连接件组成,这些关节和连接件允许手臂在三维空间中移动。每个关节都可以独立或与其他关节协同工作,以达到特定的运动轨迹。
2.**传感器和执行器**:机械手臂上配备有各种传感器,如位置传感器、力传感器和触摸传感器等,这些传感器帮助机械手臂获取周围环境的信息,并对其进行实时反馈。执行器(如伺服电机)则根据控制系统的指令,驱动机械手臂的关节进行运动。
3.**控制系统**:机械手臂的控制系统是整个设备的大脑,它接收来自传感器的信号,并处理这些信号以生成相应的运动指令。这些指令通过执行器转化为机械运动,实现纸张的精准卸载。
4.**末端执行器**:机械手臂的末端通常配备有专门的夹具或吸盘,用于抓取和搬运纸张。末端执行器的设计要适应不同纸张的形状和尺寸,确保纸张在卸载过程中不会损坏。
5.**路径规划和避障**:机械手臂在执行任务时,需要通过先进的算法来规划其运动路径,同时要能够识别并避开可能遇到的障碍物,确保操作的顺畅和安全。
6.**软件和编程**:机械手臂的软件负责控制其运动和功能,包括运动学建模、路径规划、控制逻辑和用户界面等。编程人员需要根据实际应用需求,对机械手臂进行编程,使其能够完成特定的任务。
总的来说,机械手臂卸纸机的工作原理是通过复杂的机械结构、精确的控制系统和专门的末端执行器,实现对纸张等物料的自动抓取、搬运和卸载,从而提高生产效率和降低人工成本。

联系电话
微信扫一扫